Create and use a holding pattern with the A32NX
All airliners are faced with this situation: having to wait before landing due to traffic or weather. It is also a way to get to an altitude imposed by air traffic control.
Aerial charts provide holding points with the characteristics of the trajectory to be followed while waiting, regularly called the "racetrack".
Real example
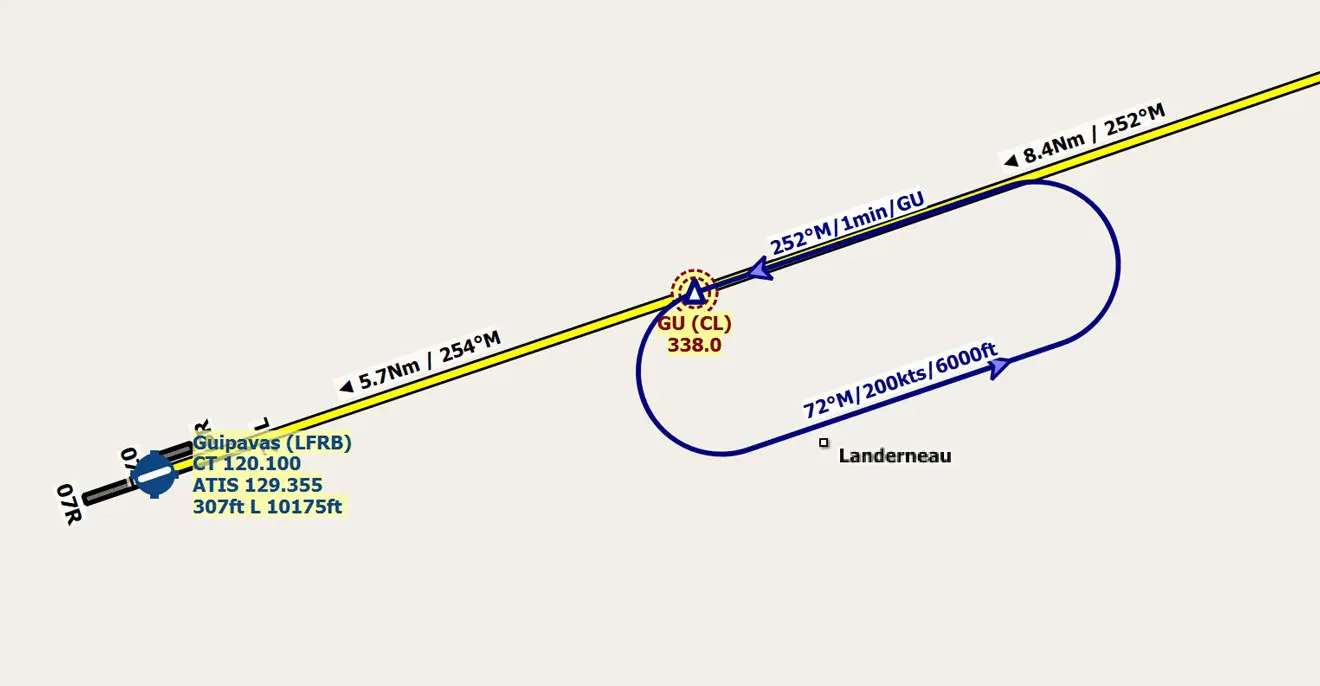
Holding pattern (real) on the NDB GU approaching Brest Guipavas (LFRB) (CF Jeppesen map).
The DEV version of the A32NX of 02/25/2022 fully integrates this feature
Preparing a (fictional) holding pattern
Beforehand, for the purposes of the tutorial and in order to clearly visualize the trajectory, a loop (racetrack) was created with Little Navmap (LNM) which perfectly manages this function (called "holding pattern") ).
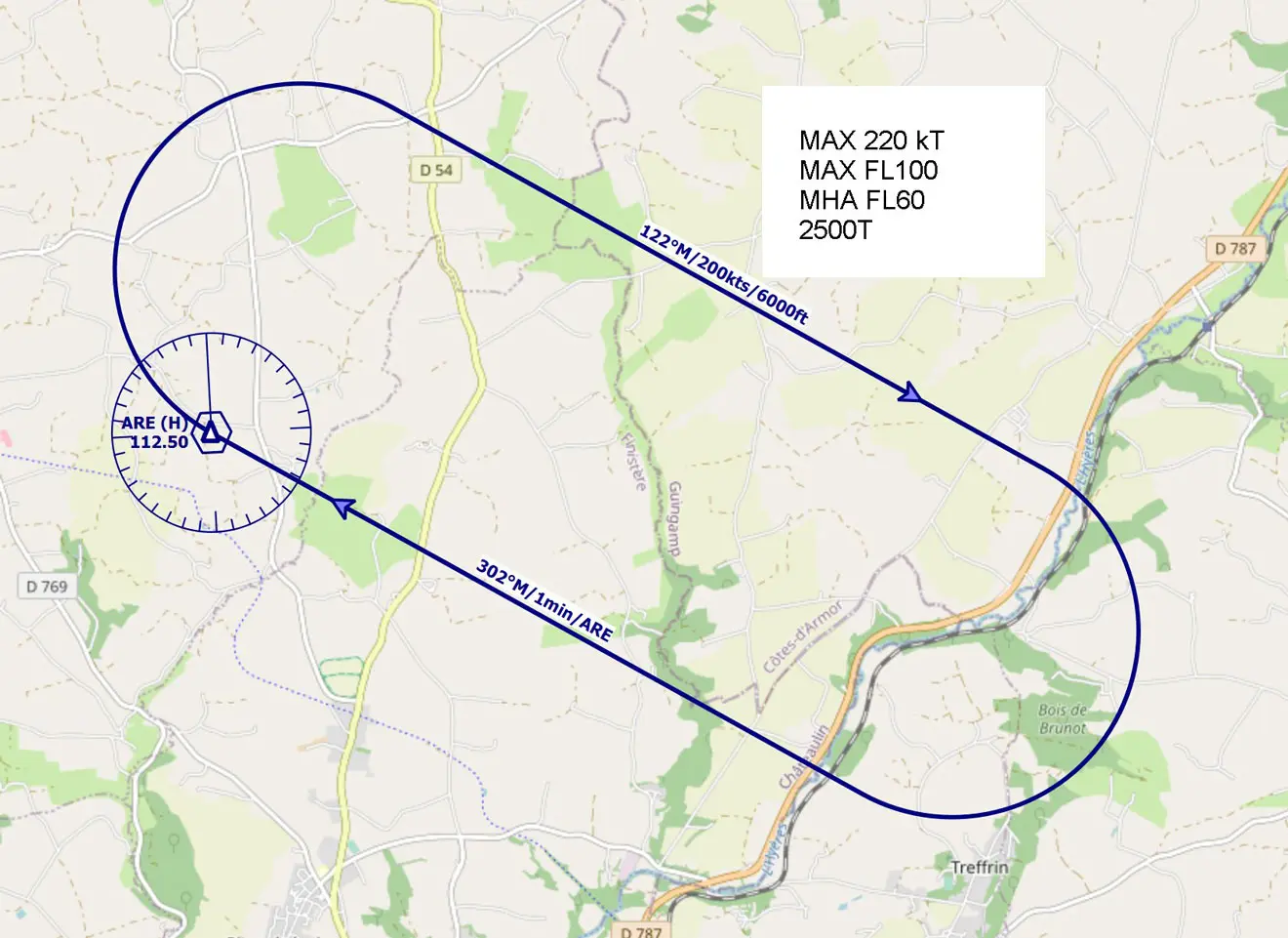
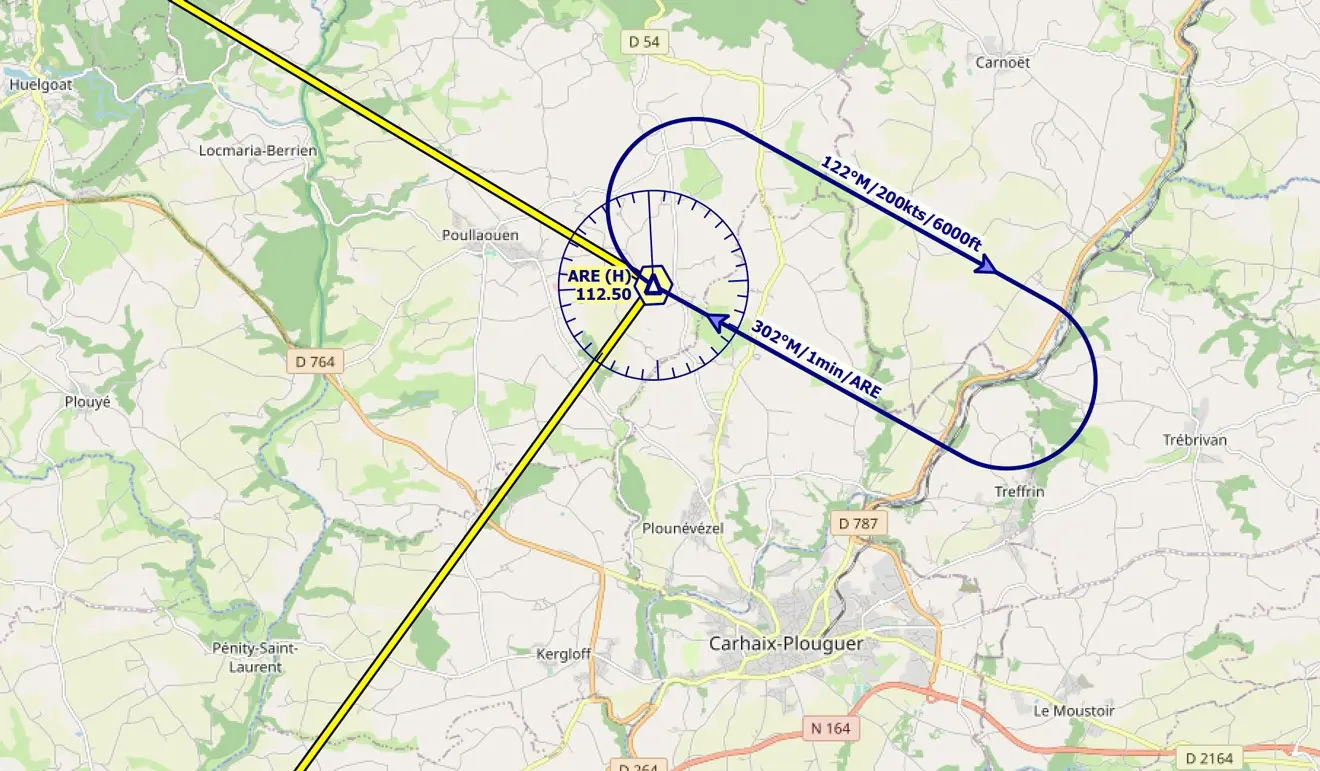
Example of creating a holding pattern on the Monts d'Arée VOR (fictitious loop with an exit heading aligned with the heading of the trajectory provided in the flight plan).
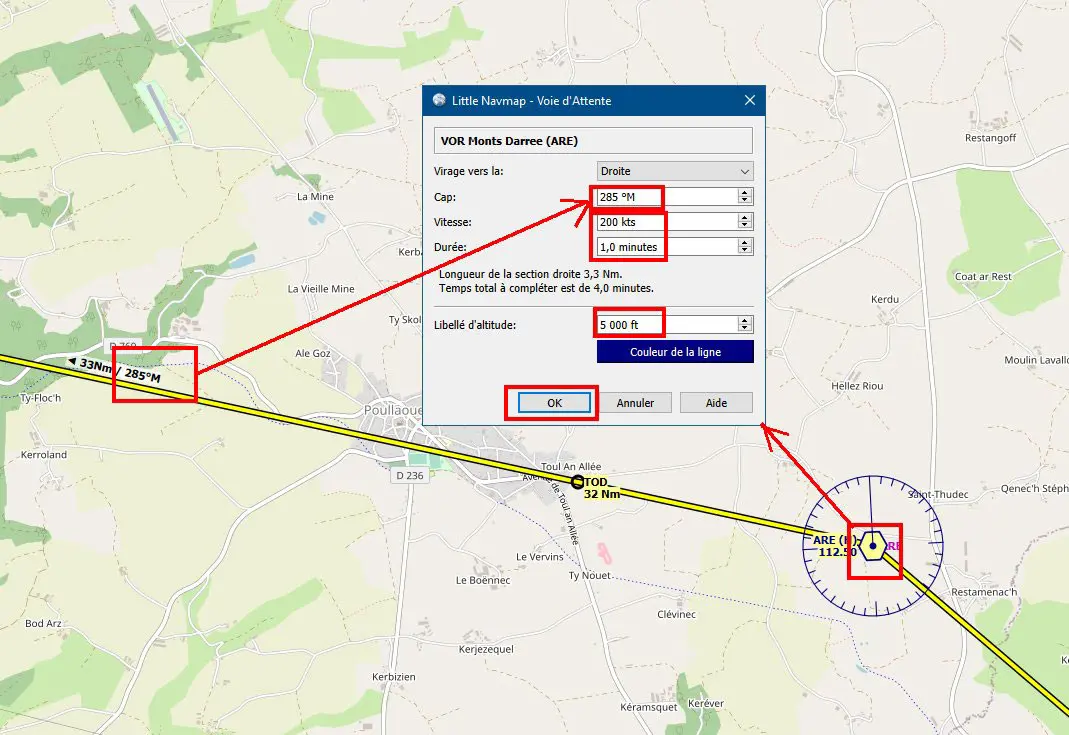
The information to enter is:
- the loop exit heading which is the heading of the trajectory provided for in the flight plan after passing the holding point.
- the maximum speed
- the duration which is generally 1 min
- the altitude at the end of the loop
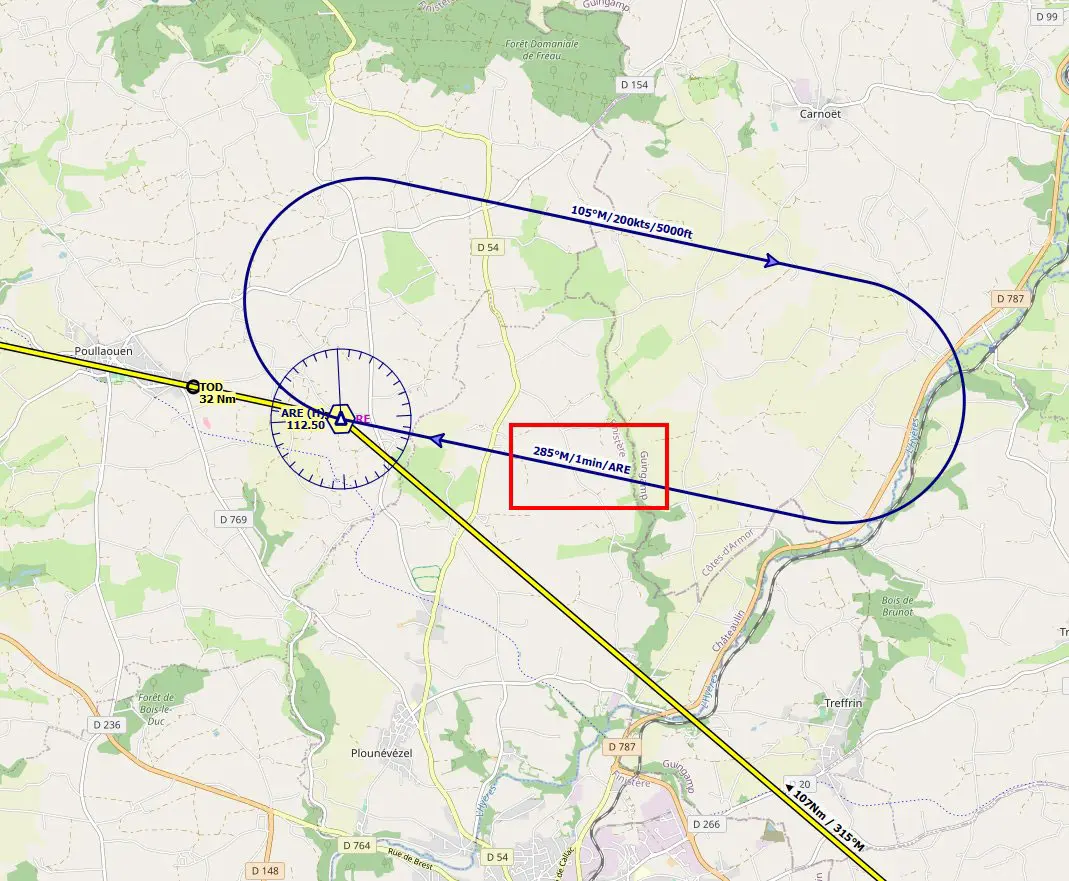
Once these parameters are provided, LNM displays the loop plot with the information entered.
During the flight, if requested by air traffic control, this type of loop can be programmed in the aircraft's MCDU. Most of the time, the usual loops are displayed in the waiting air maps.
On the plane (another holding pattern)
For this tutorial, we have created a (virtual) holding pattern on the SOPEX point during a flight LFRB-LFRB (LFRN-28 LABUL ANLEV SOPEX LFRB/ILS28L), so we need the enter the MCDU.
The original flight plan

After pressing the button to the left of this point, a modification page is displayed.
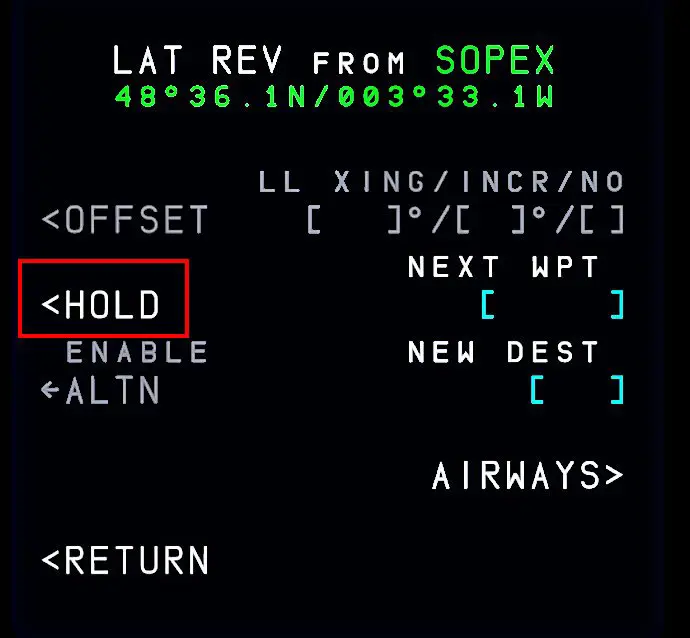
Click on the button in front of HOLD to display the loop creation page which already offers values for the parameters. If they are not suitable, they are of course modifiable. They are validated with the INSERT key.
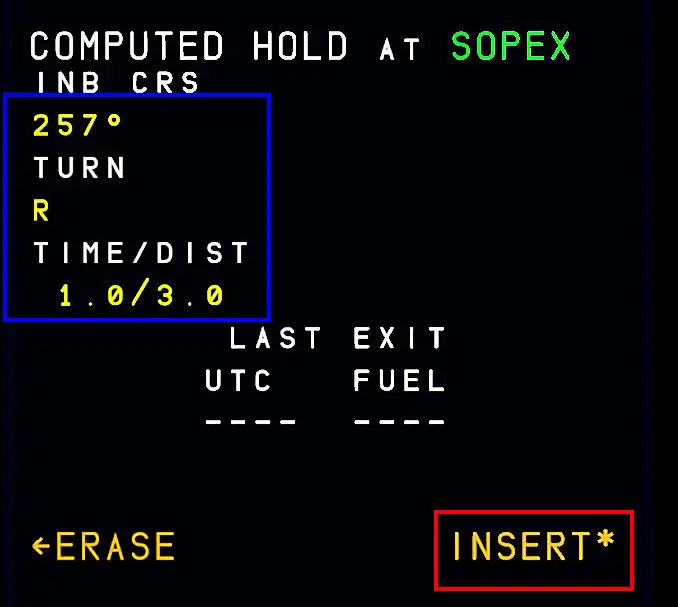
The flight plan is modified as follows:

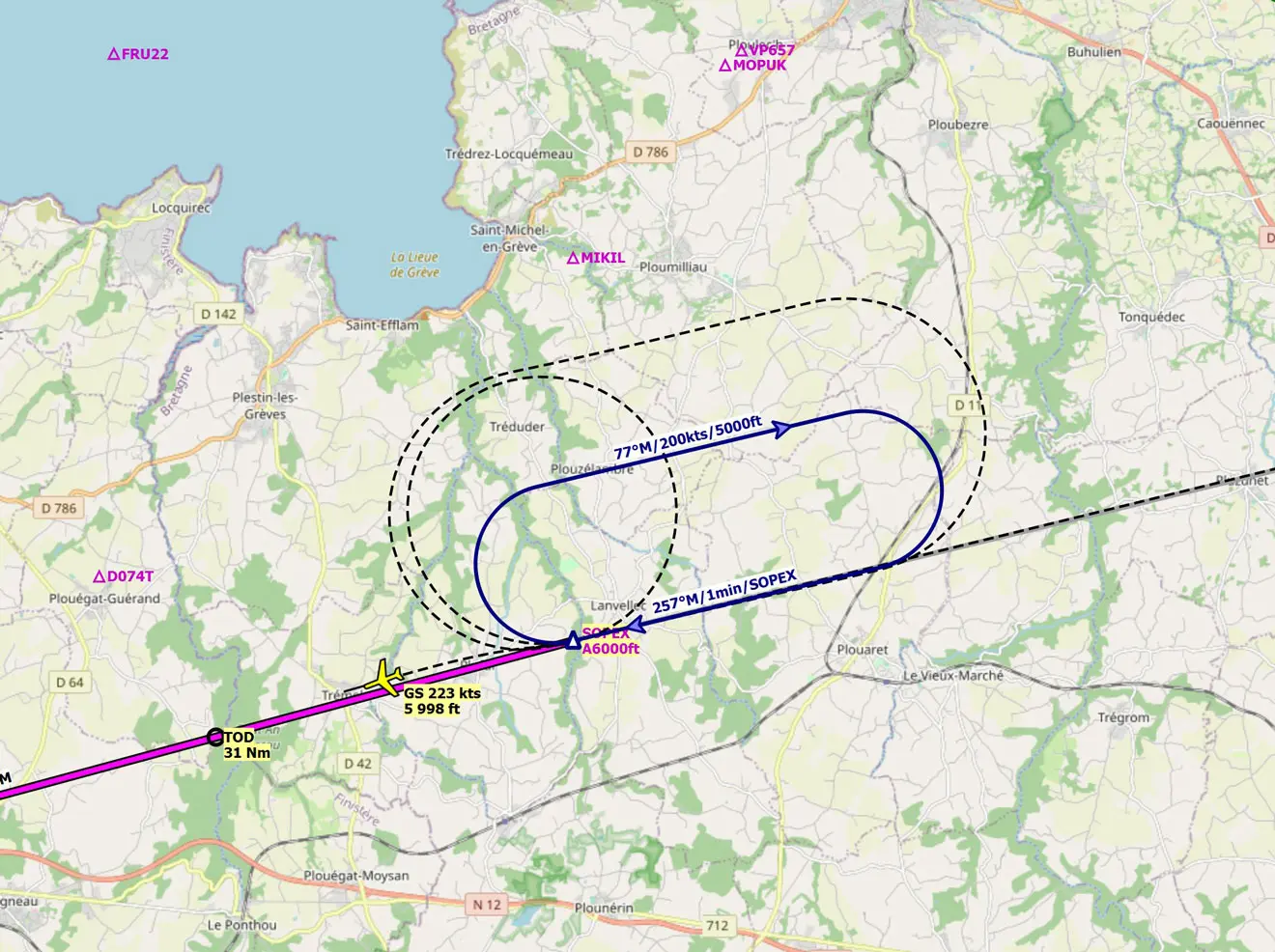
On the A320's ND screen, as long as the wait point is not the next point to wait for, the information is shown just with a curved white arrow indicating the direction of the loop.

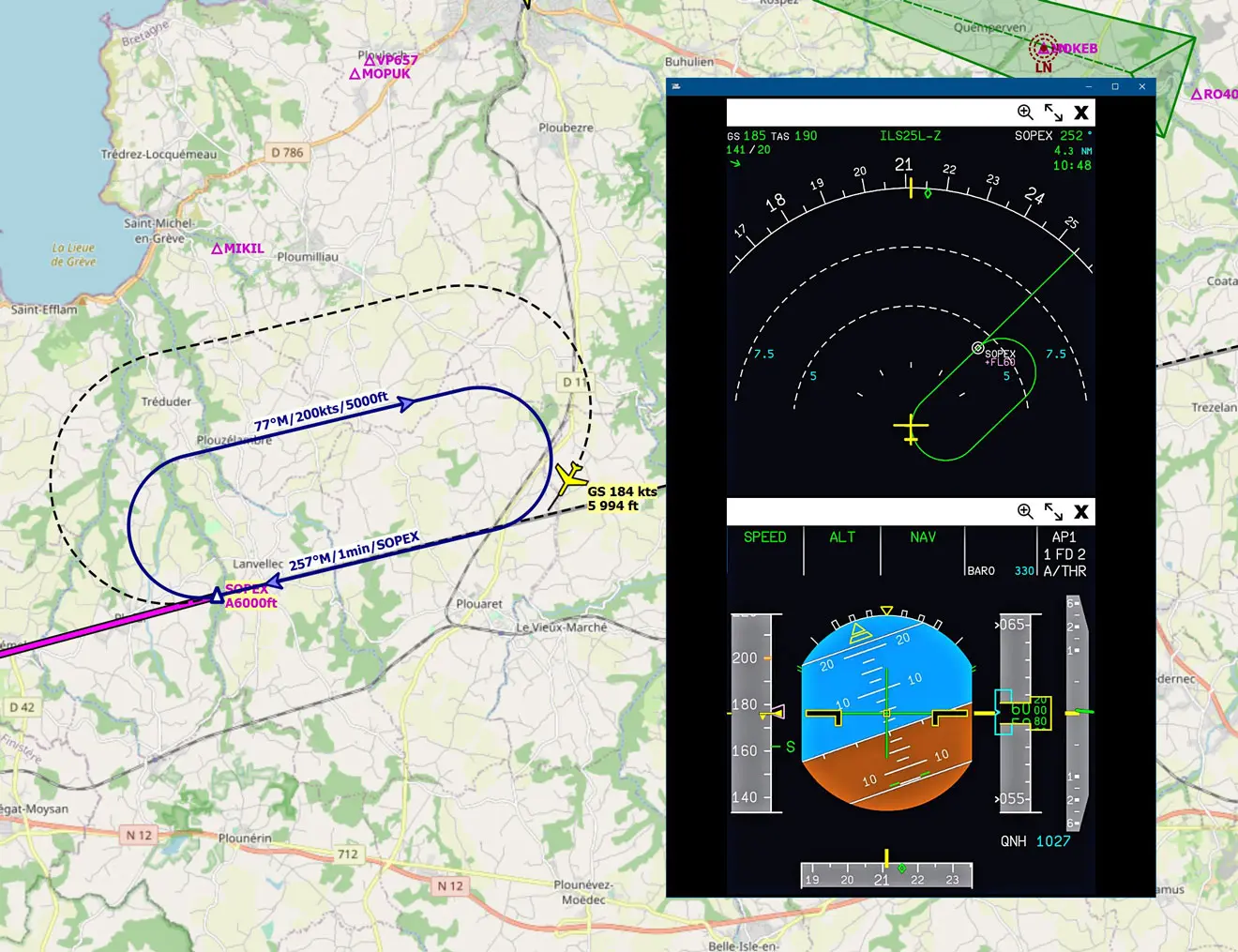
When the holding point is the next point on the route, the display shows the true path that the aircraft will follow.

Once the aircraft has entered the loop, the FCU is told the speed and altitude that we want to wait for, the trajectory is managed via the MCDU.
Note: with the A32NX, the speed seems to be managed automatically inside the loop (< 180 kts).

When in the loop, the MCDU displays the exit indication "IMM EXIT*". Pressing the corresponding button (anywhere in the loop) will cause the aircraft to exit the loop when passing the holding point.

Pressing hard "IMM EXIT *" displays the indication "RESUME HOLD" which allows you to stay in the loop if necessary (on request from air traffic control, in general).

In the example, here is the plot of the plane on the LNM map (the plot of the loop in the flight plan (blue) is theoretical) and that of the ND which is well followed by the device.
NB: If you requested the exit a little too late, the plane having already started to turn, you are entitled to a "free" turn in the form of a circle which allows the aircraft to return to the desired heading.

This will ultimately give the following plot
Other cases of entering a holding pattern
The entry of the aircraft into the holding racecourse is rarely done in the exit axis. The MCDU knows how to handle these cases perfectly.
This time we take a real case: the Monts d'Arée VOR racecourse (see Jeppesen map)
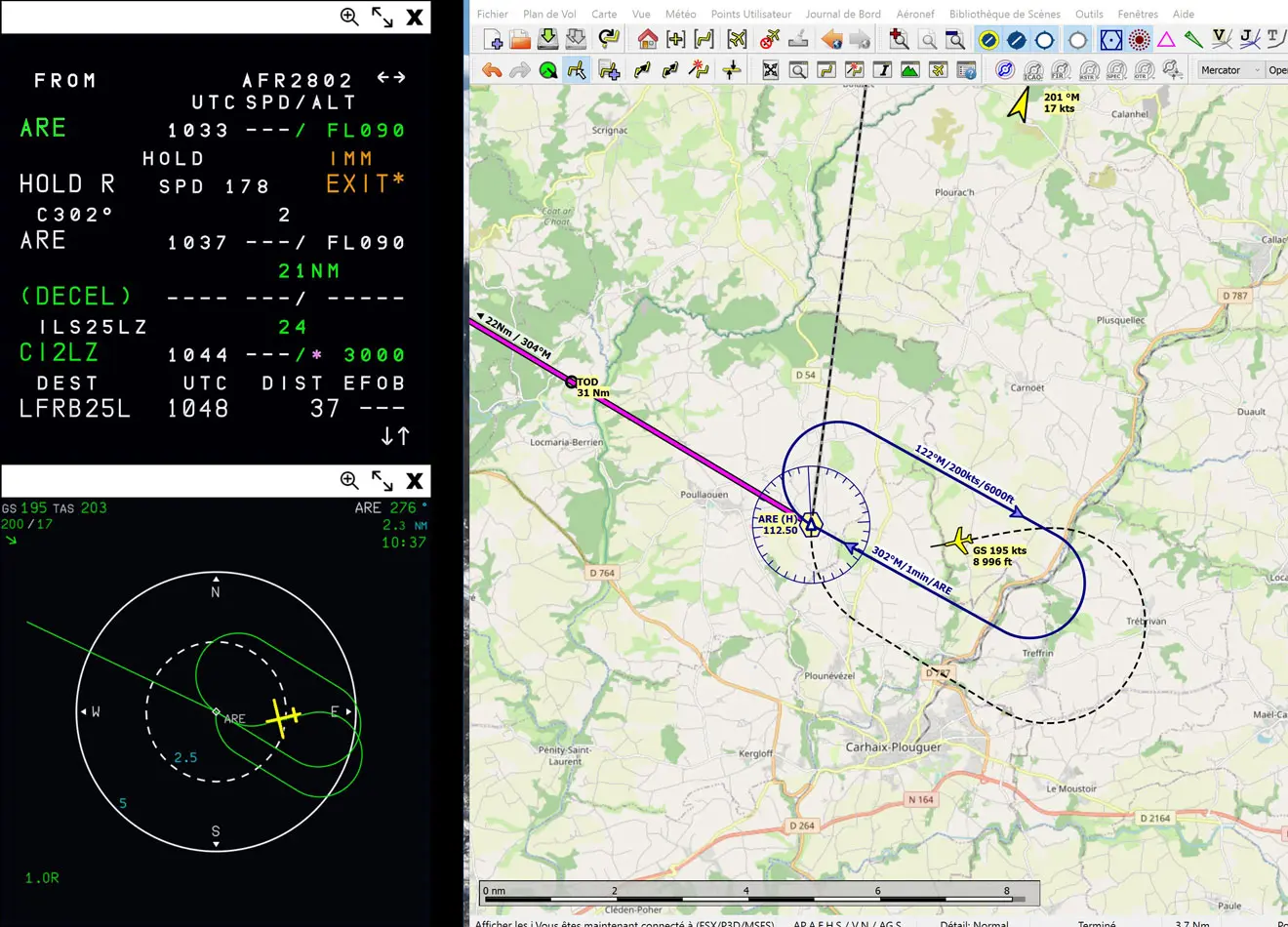
Case 1: entry by a road coming from the south
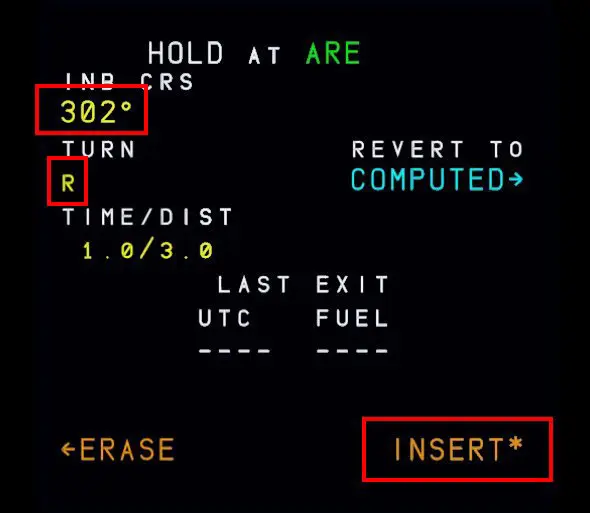
Programming in the MCDU therefore becomes, with an exit heading of 302°

When the aircraft arrives at the ARE point, the displays are as follows (MCDU and ND)


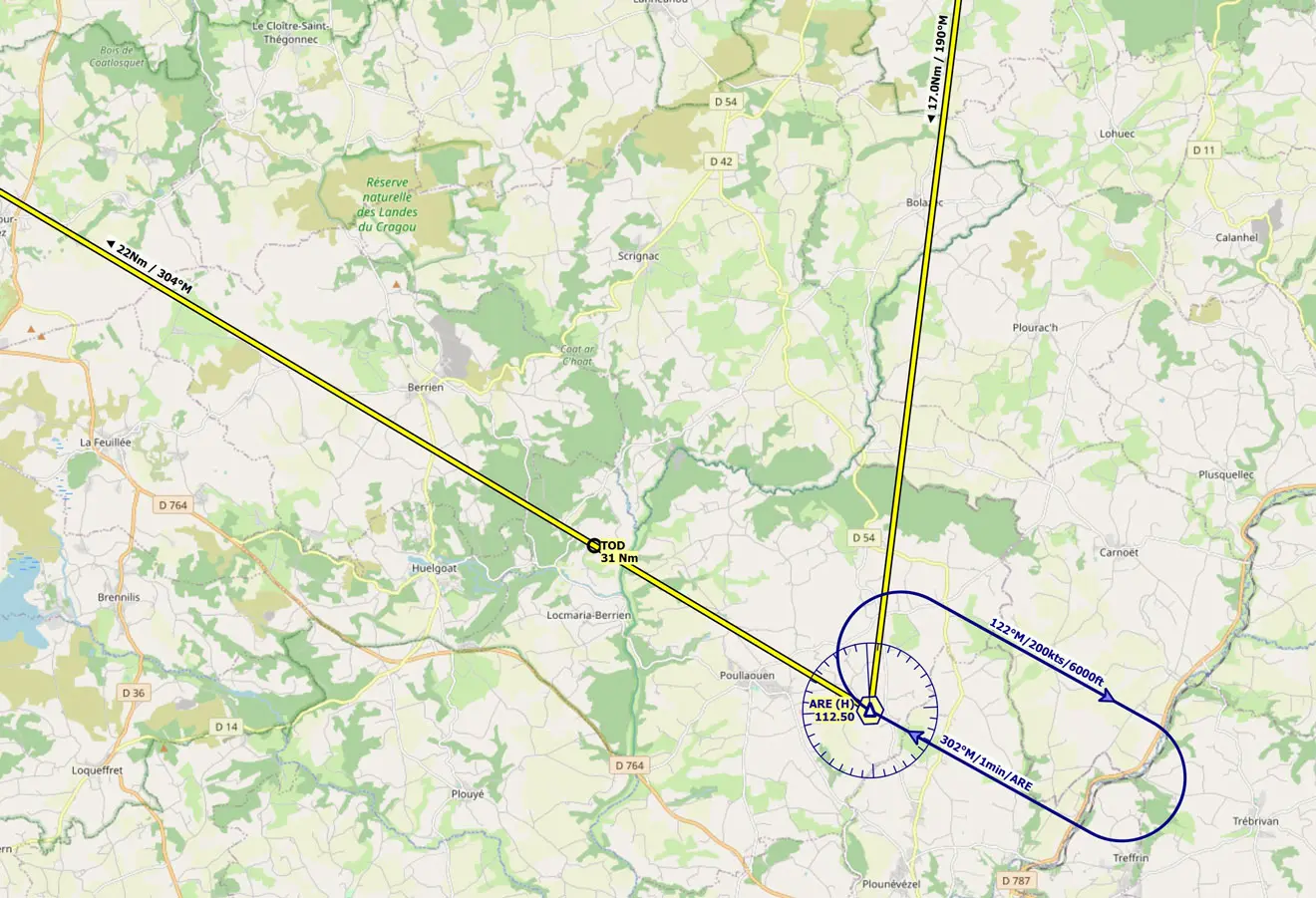
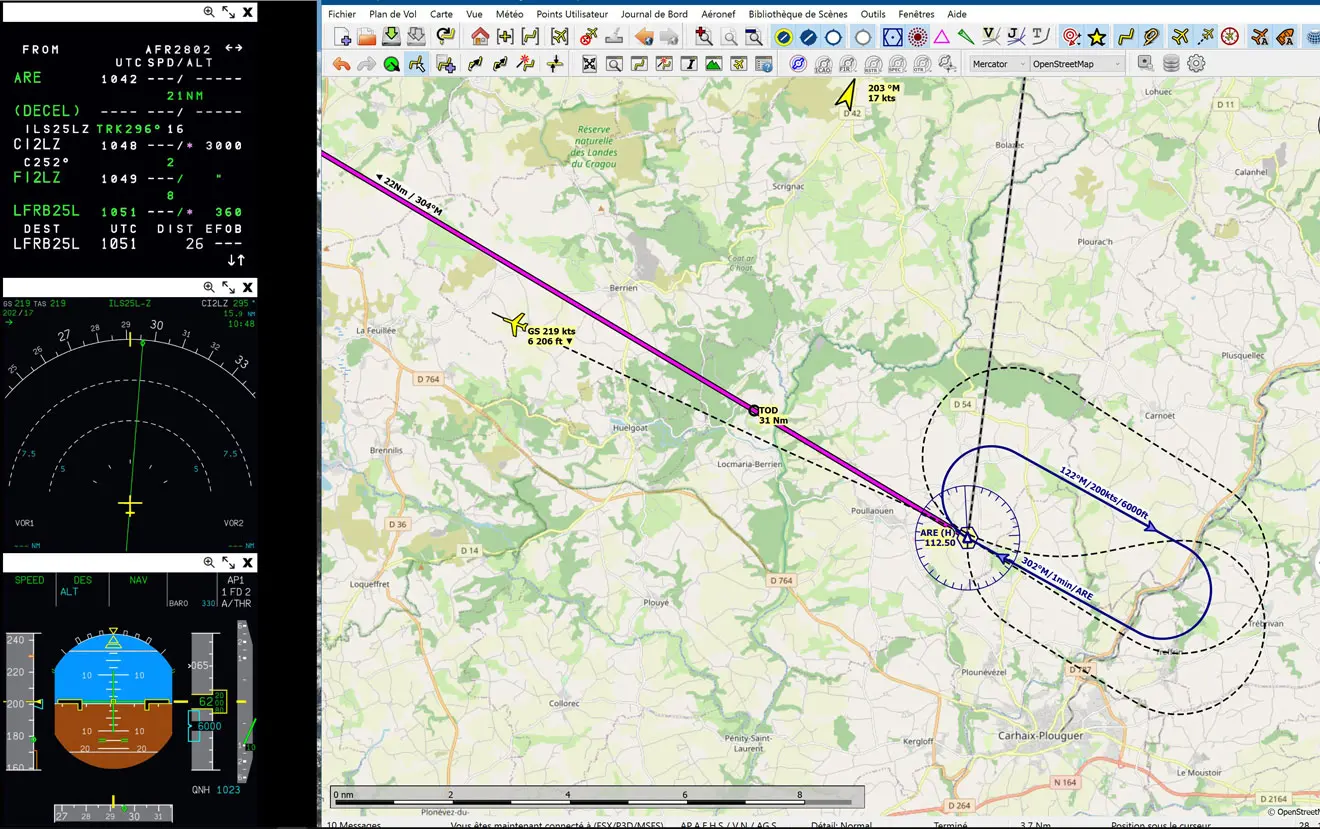
Coming out of the loop, the aircraft's trajectory was as follows:
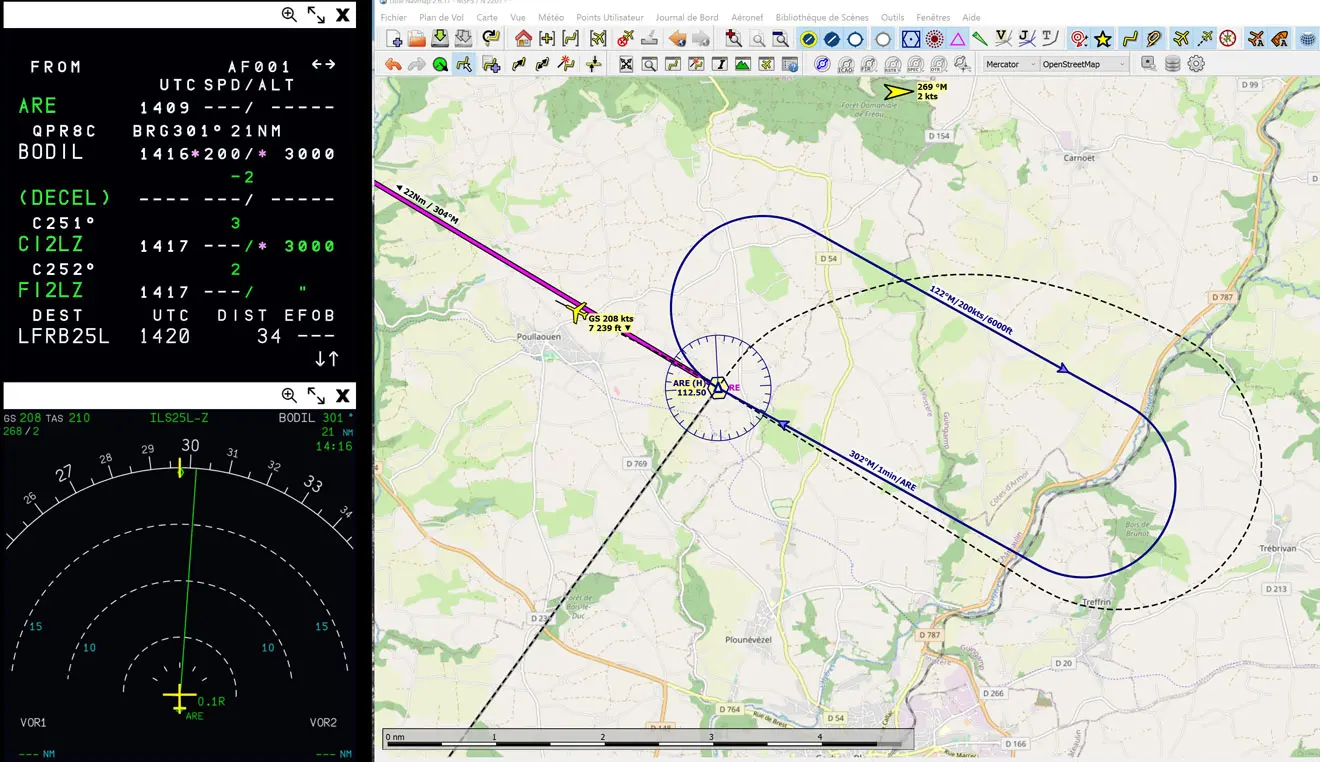
Reminder, with Little Navmap, the drawing of the planned loop (blue line) is not to scale, but the tracking on the ND is good.
Case 2: entry by a road coming from the north
The creation of the route in the MCDU is identical to that of the route coming from the north, but the calculated result is different: images of the MCDU and the ND approaching the holding point


The start of the trajectory is as follows:
Which gives the final plot at the loop output:
The A32NX is therefore perfectly operational for handling "racetracks".