A320 and ILS
Preamble
The ease of keeping the autopilot engaged until landing does not reflect the reality of a flight 99.9% of the time.
Most of the time, the crew takes over the aircraft by hand by disconnecting the autopilot to proceed with the landing.
The rare times when the aircraft will land alone (but nevertheless closely watched by the crew) will be the times when it cannot do otherwise and most likely because of the prevailing weather conditions at the destination aerodrome.
Some facts / reminders / news (depending on your level of knowledge)
1 - We can group the approaches into 4 main types:
- Precision approaches: these are procedures that integrate lateral and vertical guidance. They mainly include ILS (but also some Radar approaches and some RNAVs).
- Vertical guidance approaches (mainly RNAV approaches)
- Non-precision approaches (some RNAVs and conventional approaches, NDB, VOR, etc.)
- Visual evolutions (visual approaches, MVI or MVL sight maneuvers, and some RNAVs)
2 - In the ILS approaches, we will find CAT I, CAT II, CAT IIIA, CAT IIIB or CAT IIIC approaches.
3 - The choice of approach to take is directly linked to the meteorological conditions at the destination aerodrome and is not necessarily "in the hands" of the crew.
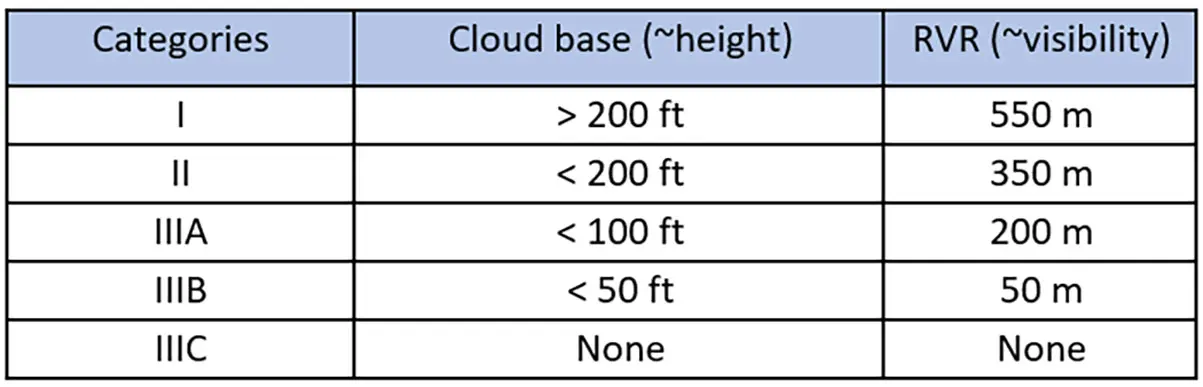
4 - As soon as the conditions for carrying out a CAT I ILS are no longer met (cloud base less than 200 ft and / or visibility less than 550 m, only one of these parameters is sufficient), we then speak of low level operations visibility (Low Visibility Procedures, LVP).
5 - To carry out an ILS approach in LVP conditions, 4 conditions must be met:
- The arrival field is equipped for and such procedures are in use (LVP in force in the field and announced by radio or on ATIS)
- The crew followed an instruction and were trained for this type of approach
- The aircraft "knows how to do" and its equipment conditions are met (the A320 is capable of carrying out CAT IIIB approaches but not CAT IIIC, some aircraft are only capable of CAT II or even CAT I [TBM 700])
- The company is authorized by the administration to carry out this type of approach
6 - By respecting all the preceding conditions, an automatic landing may nevertheless not be feasible for other reasons such as too strong a wind (we will retain as a first approximation and for the sake of simplification that for the A320 family and its derivatives, in the case of an automatic landing, is limited by the triptych "10/20/30", 10 knots of tail wind, 20 knots of crosswind, 30 knots of head wind (on the ground). Above this values of wind, automatic landing is not certified (and should not be attempted).
7 - Under certain (normal) conditions and by applying a special procedure, a landing above the maximum landing weight (MLW) is possible on the A320 family ... but not an automatic landing and therefore not a landing under conditions LVP. This means that in the case of take-off in LVP conditions with a load (fuel + passengers + freight) high enough to be above the MLW, in the event of a breakdown on departure, you will not be able to come back to land on your starting field before you reach your MLW. Before taking off, you must then have chosen a take-off alternate terrain whose meteorological conditions will allow you to land CAT I (some A320 family aircraft are nevertheless capable of making an automatic landing up to 67 or even 69T).
How do I know if the aerodrome is equipped with a CAT III ILS?
By studying the approach sheet!
The ILS 25L in Brest is CAT III, the ILS 28 in Rennes is not (nor CAT II, therefore only CAT I).
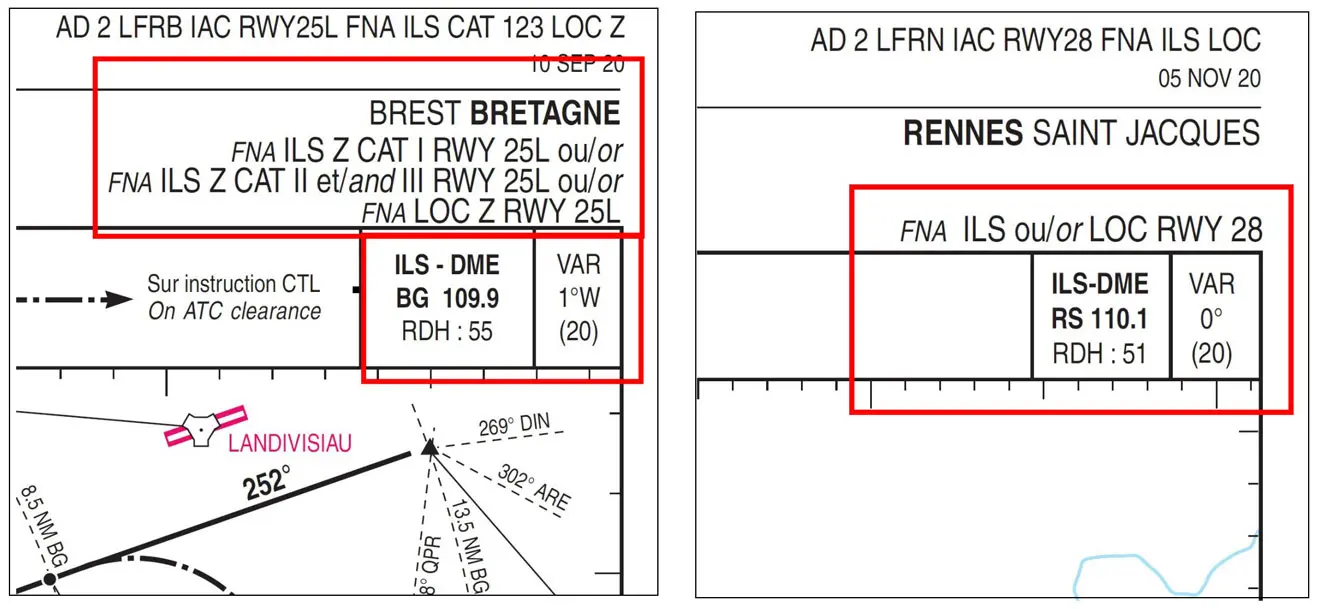
So in Rennes, with less than 200 ft of ceiling and / or less than 550 m of visibility, we can no longer land and we have to divert (we cannot even attempt the approach by law if we know that the conditions are not met).
What does it mean for an aerodrome to be equipped with CAT III and LVP in force?
The biggest point is a drastic reduction in capacity in terms of movements on the airport platform (and therefore a limitation in the number of arrivals and departures, generating what are called slots, i.e. say imposed times of departure or arrival generating delays that can translate into several hours).
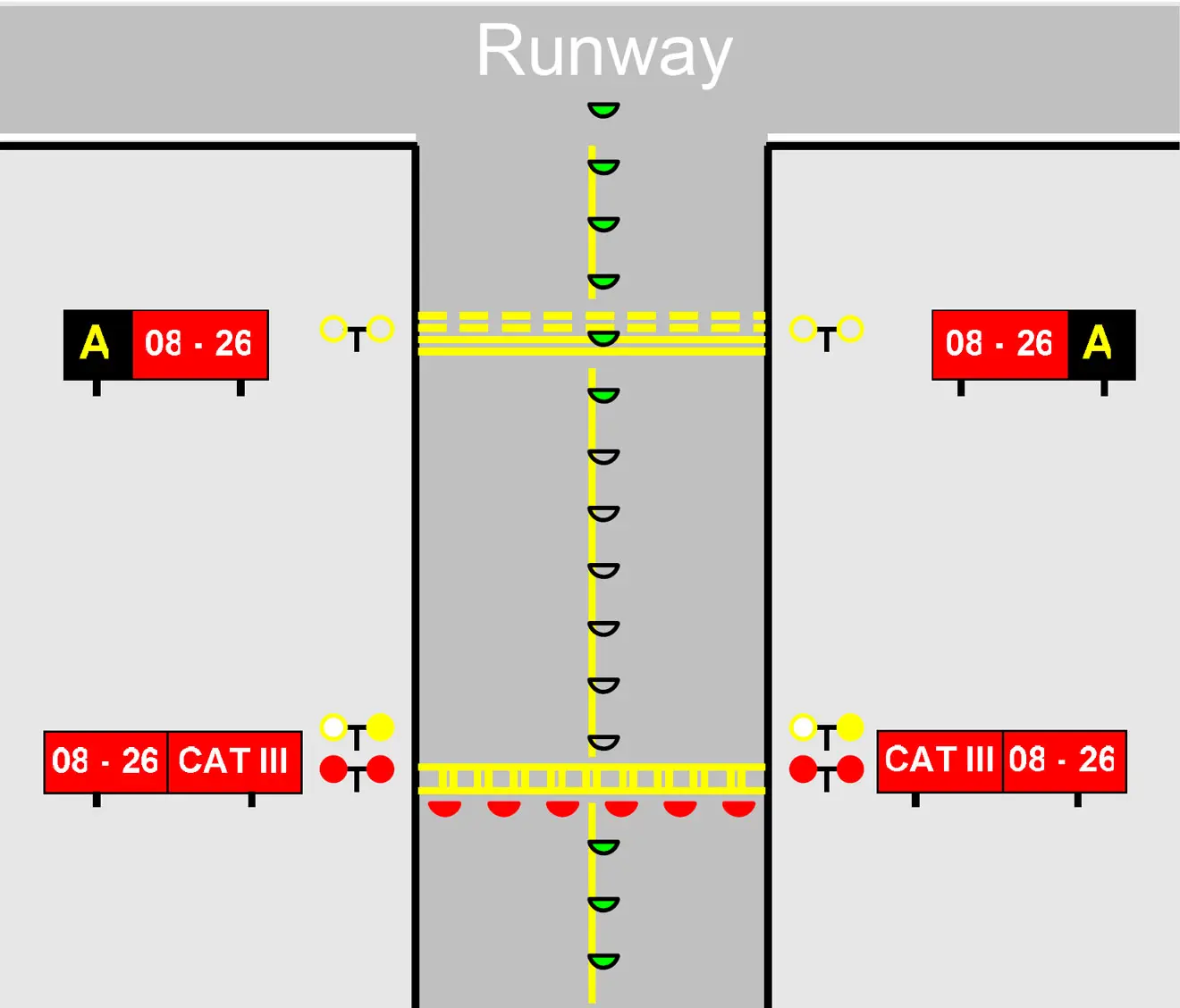
During an automatic approach, the airplane is guided without intervention by the crew (except for the extension of the drag, flaps and landing gear and increased monitoring of the behavior of the airplane) from the start of the procedure until, eventually, its complete stop on the track An automatic approach therefore requires that the radio beam which guides the aircraft to the ground be 100% reliable and never be disturbed by the passage, for example, of a vehicle or another airplane crossing the runway centreline at the rolling. This implies that there will be no aircraft preceding you and performing the ILS a few NM in front of you or that an aircraft will take off from the runway on which you are about to land. To make sure that other planes on the ground will not disturb the ILS beam, the stopping points are even set back from the runway.
This also implies, for example, that the power supply to the airport is no longer the same as when operations are normal. Indeed, in the event of loss of the electrical network, an immediate power supply change solution is required so as not to jeopardize the trajectory of an aircraft which is in the process of landing.
Likewise, an ILS CAT III will not be checked and / or calibrated at the same frequency as a "simple" ILS CAT I (and its maintenance will be much more expensive).
Finally, during an automatic landing, the crew will ask the passengers to turn off all their electronic devices in order to minimize the risk of electronic disturbances.
All these remarks have only one goal: without the agreement of the air traffic control which will have had time to take all the necessary measures beforehand so that you can carry out an automatic approach in complete safety (according to its availability), it should be unimaginable that a crew consider being able to make a "wild" automatic approach (for instruction, for example).
Unfortunately, this has already happened, among others to a crew of a Singapore Airlines Boeing 777 in Munich, who had decided, because of bad weather conditions, on their own initiative to make an automatic landing while the airport was not in LVP conditions. It was established that the ILS beam had been disturbed by the drift of a taxiing aircraft and the AP of the B777, already on the ground, supposed to keep the aircraft in the center of the runway, on the contrary, initiated an exit track with the result below.

So no automatic landing if the control is not aware and / or does not allow you!
What are the differences in preparing for a CAT I vs CAT III approach?
In the preparation, not much.
In preparation, what will change will be the introduction of the minima in the PERF APPR page.
In the case of a CAT I approach: we will enter in the MDA (or BARO) line, the value of the minima found on the ground approach sheet.
To use the Brest sheet, for the ILS 25L, we will introduce the value of 520 ft.
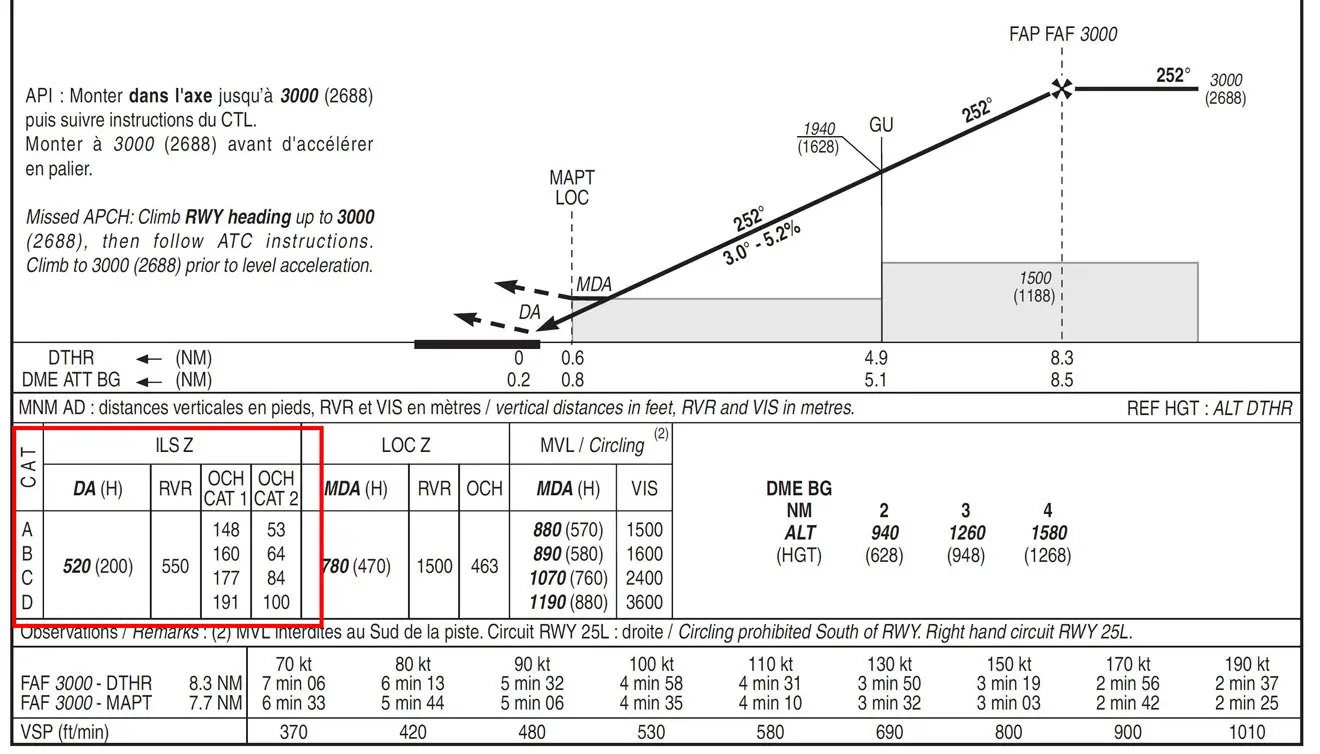
(Note that the CAT visible on the left side of the table does not correspond to the approach category, but to the category of the airplane which determines the operational minima for each airplane, the 320 family being part of CAT C. On some approach sheets, you will be able to see different minima depending on the category of aircraft as for the MVL column of this document, you will then have to choose the correct one).
We find on this sheet, the minimum values of the CAT I (the 200 feet of height in brackets corresponding to the 520 feet of altitude [the threshold of the 25L in Brest is at 312 feet] and the 550 m of visibility).
In the case of a CAT III approach: the minimum value for which the airplane is authorized, ie less than 50 ft, will be entered in the DH (or RADIO) line. We will take as an example a DH at 20 ft. This time we are talking about a height (to be read on the value of the probe) while for the CAT I, we were talking about an altitude, to be read on the altitude strip, right side of the PFD.
For the record, some equipment in the field can be broken for a CAT III approach while it cannot be for a CAT I approach. Example, the approach ramp. We could say that during a CAT III approach, the weather is necessarily worse than during a CAT I approach and therefore that we would need as much visual aids as possible, but during a CAT III approach , the decision to continue the landing is formalized at 20 feet in our example (the sight of a single lit beacon is sufficient to decide to land) while the airplane is already above the runway (the plane is set to fly over the threshold at 50 ft) having already passed the approach ramp which is therefore unnecessary. On the other hand, during a CAT I approach,if you can't see anything you have to go around to 200 ft and there, the ramp will be of great help to continue to the runway if you can see it!
What are the differences in carrying out a CAT I vs CAT III approach?
You could almost say it's not the same approach!
While for CAT I, the approach could be conducted without any automatism, that is to say, "by hand" (neither AP, nor ATHR, nor FD or hybrid driving with only certain automatisms), they are mandatory for an automatic approach, even with both APs engaged so that the failure of one is compensated by the other immediately. The failure of one of the automations causes de facto the impossibility and the prohibition of carrying out such an approach (in the same way as a failure causing the display of the CAT 3 line on the Status page).
During the CAT I approach, at minima (200 ft / ground), it will be necessary to decide whether the conditions allow the approach to continue and in this case disengage the AP (at the latest at 160 ft / ground) to continue the landing in manual.
The CAT III approach with automatic landing being particularly focused on the monitoring of the systems, a briefing will therefore have been carried out within the crew with a distribution of the tasks of each.
For the realization, the crew will have checkpoints on its trajectory which if not reached will lead to a go-around.
When the aircraft will be authorized to approach, on a trajectory for intercepting the final approach course with the LOC diamond visible, the APPR key can be pressed on the FCU. This will arm the LOC and G / S modes (and the FMA will verify that the display is correct).
The two APs will be engaged and the FMA will display the capacity of the possible approach (up to 5000 ft / ground, this will be CAT 1, then below 5000 ft, CAT 2, then CAT3 Single and CAT 3 Dual). Warning, this display does not give the category of the approach in progress but the ability of the airplane to carry out it (which means that if during the entire approach you have CAT 2 displayed instead of CAT 3 Dual, you cannot fly a CAT III approach).
During the last level, we will continue to reduce speed, we will release the trails accordingly and we will monitor the capture of the LOC then the GLIDE. The go-around altitude will then be displayed (for Brest, 3000 feet will be displayed at the FCU). When capturing the GLIDE, we will check that the descent point is compliant (for Brest, we start the descent at 5.3 NM ILS / 2000 feet) and does not differ excessively from the procedure sheet (only temperatures very cold or very hot can explain a noticeable difference in distance when going downhill).
We will endeavor to confirm the aircraft's Call-outs (1000, 500, 400, 300, 200, hundred above, minimum), one may be missing in certain circumstances ... but not two.
At 350 ft, we expect to see LAND displayed on the PFD.
At 40 ft, FLARE mode will engage with display on the PFD.
At 30 ft, the ATR will begin to reduce thrust.
At 10 ft, at the DELAY call-out, reduce the thrust if the landing is continued (view of a light beacon on the ground).
On touchdown, ROLL OUT display on the PFD and monitoring of the trajectory of the airplane which must remain in the center of the runway, passage of Reverses by the pilot at the controls.
Monitoring of the automatic exit of the spoilers, the implementation of the autobrake and the deceleration of the aircraft.
If all goes well, the plane will stop by itself in the middle. To clear the runway, the AP will have to be turned off.
A good practice is before the approach to calculate its landing distance, which will allow to know roughly where the plane has stopped and what will be our next ramp to clear the runway (remember that you can have only 50m of visibility during an automatic landing. This is enough to not know where you are, even on terrain that you practice regularly).
If for one reason or another, one of the above actions does not go as planned, if an alarm light or the Autoland light comes on, a go-around is mandatory.
Note that the Autoland system monitors many more parameters during an automatic approach (such as the reliability of the signals received, etc.) and is therefore more able to generate an alarm which should lead to a go-around.
Finally, if a go-around is initiated at the minimum (no view of a beacon), there is every chance of touching the runway and that the AP will jump by itself.