Pilatus PC-12/24 : chargement d'un plan de vol dans le GPS Honeywell Primus Apex
Les Pilatus PC-12 et PC-24 sont des rares avions de FS2024 qui ne sont pas équipés du système d'avionique Garmin. On va donc voir ici comment entrer manuellement un plan de vol dans ce GPS. On va donc voir ici comment entrer manuellement un plan de vol dans ce GPS.
Comme le montre l'image ci-dessous, le tableau de bord se compose de 5 écrans Honeywell.

Pour le chargement du plan de vol nous allons nous intéresser aux deux écrans encadrés de rouge : le GPS et le CCC (écran du bas) qui permet de servir (entre autres) de clavier pour entrer des données du vol. Ils ont été mis côte à côte pour simplifier le tutoriel.
On commence par la sélection des points de départ en cliquant sur l'icône de l'avion au sol puis sur la case "Origine" ce qui ouvre le clavier du CCC.
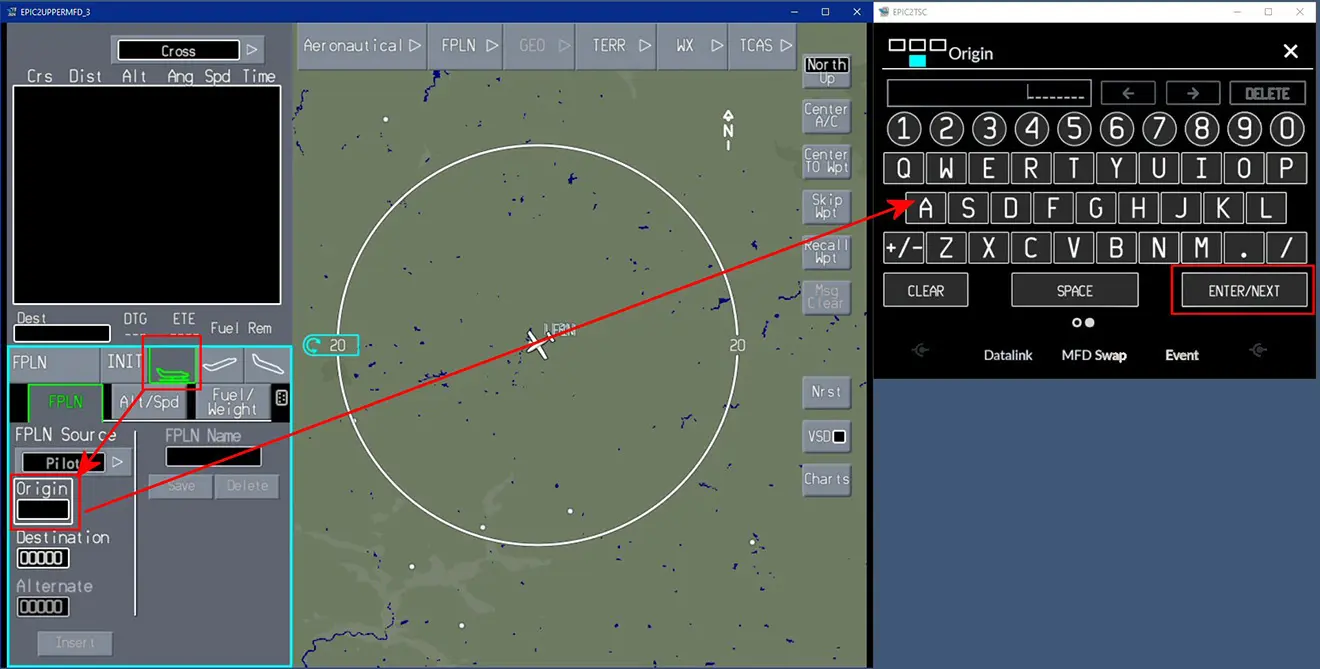
On entre le code OACI de l'aéroport de départ, on valide par "ENTER/NEXT" du CCC et on fait la même chose pour l'aéroport d’arrivée. On valide ensuite par appui sur le bouton "INSERT".
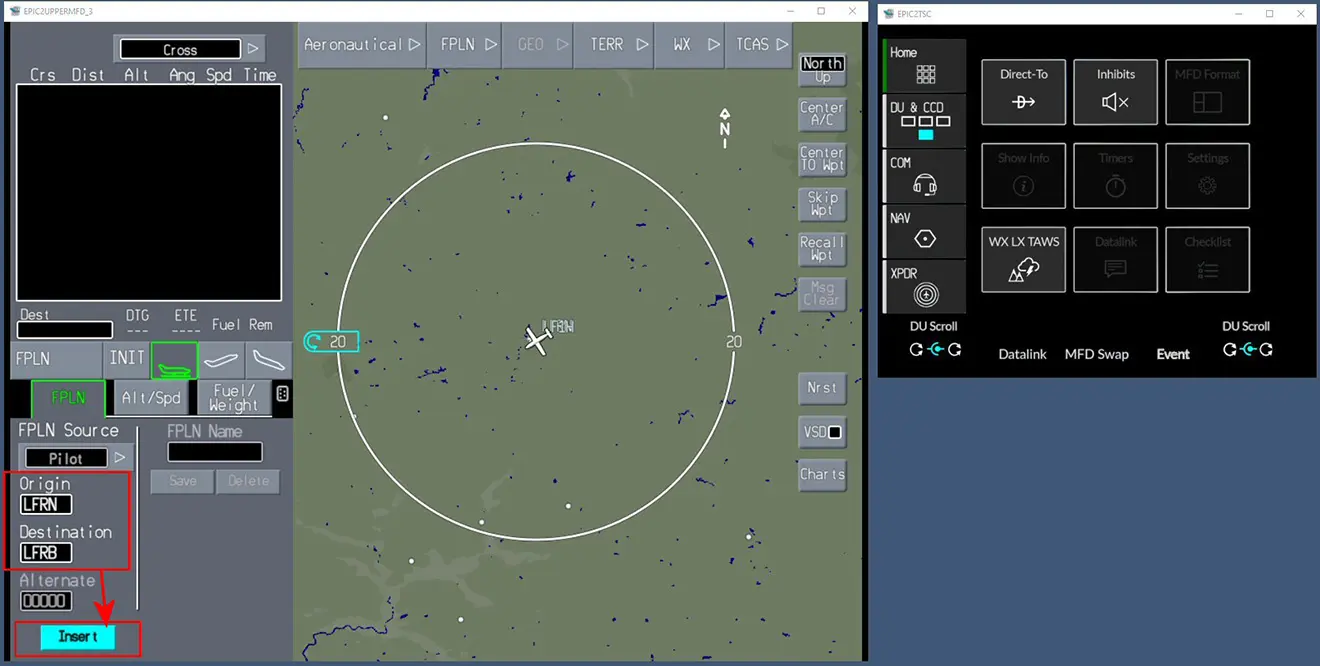
Le plan de vol est initialisé et on va activer cette phase de sa construction.
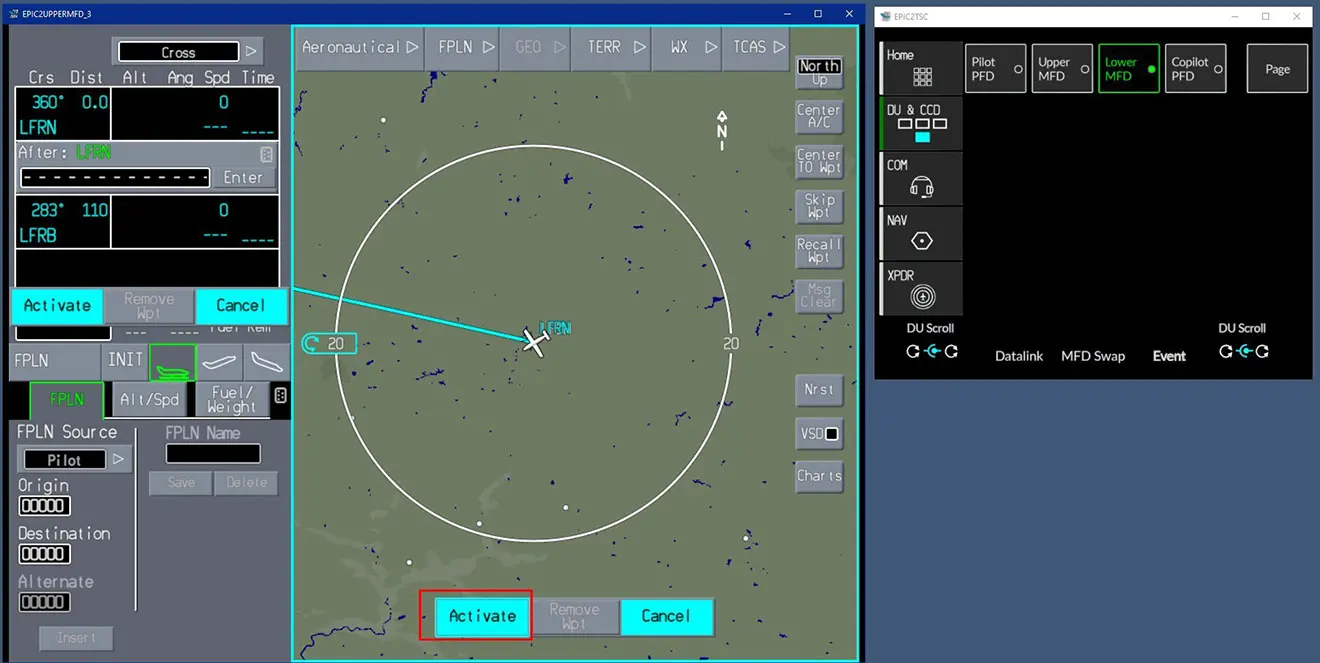
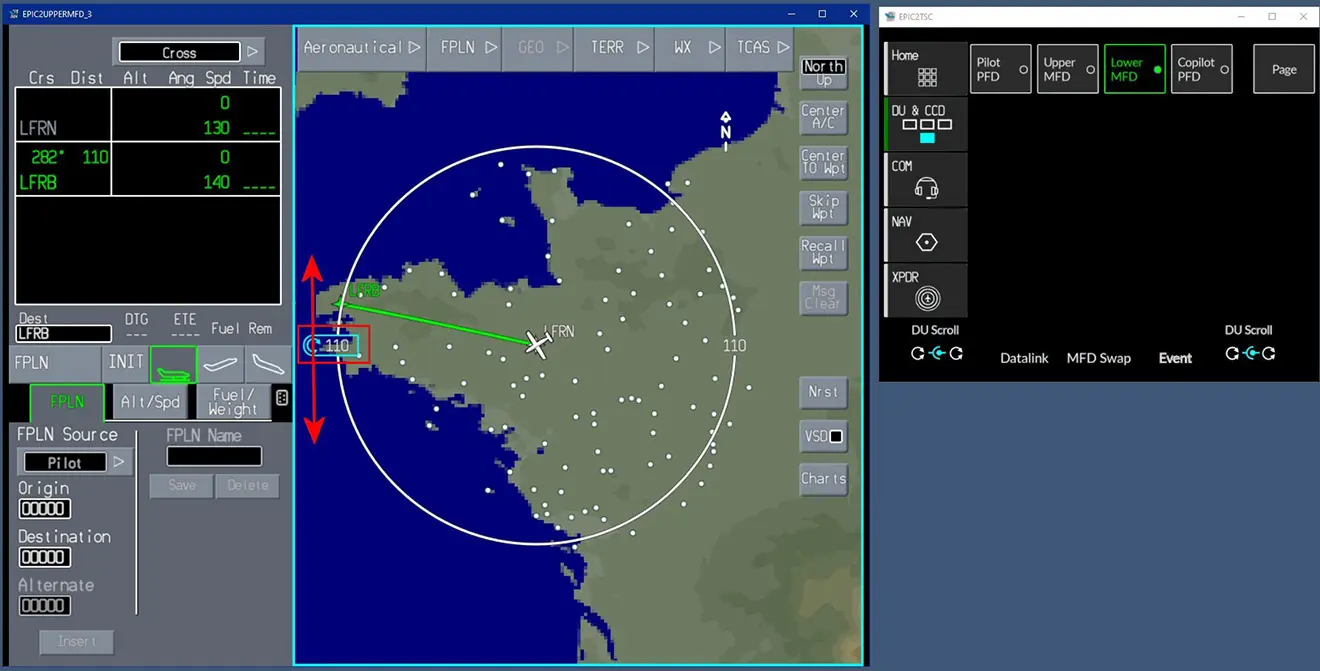
Pour voir le tracé complet sur la carte du GPS, on bouge la souris la long du cercle à partir de la zone encadrée.
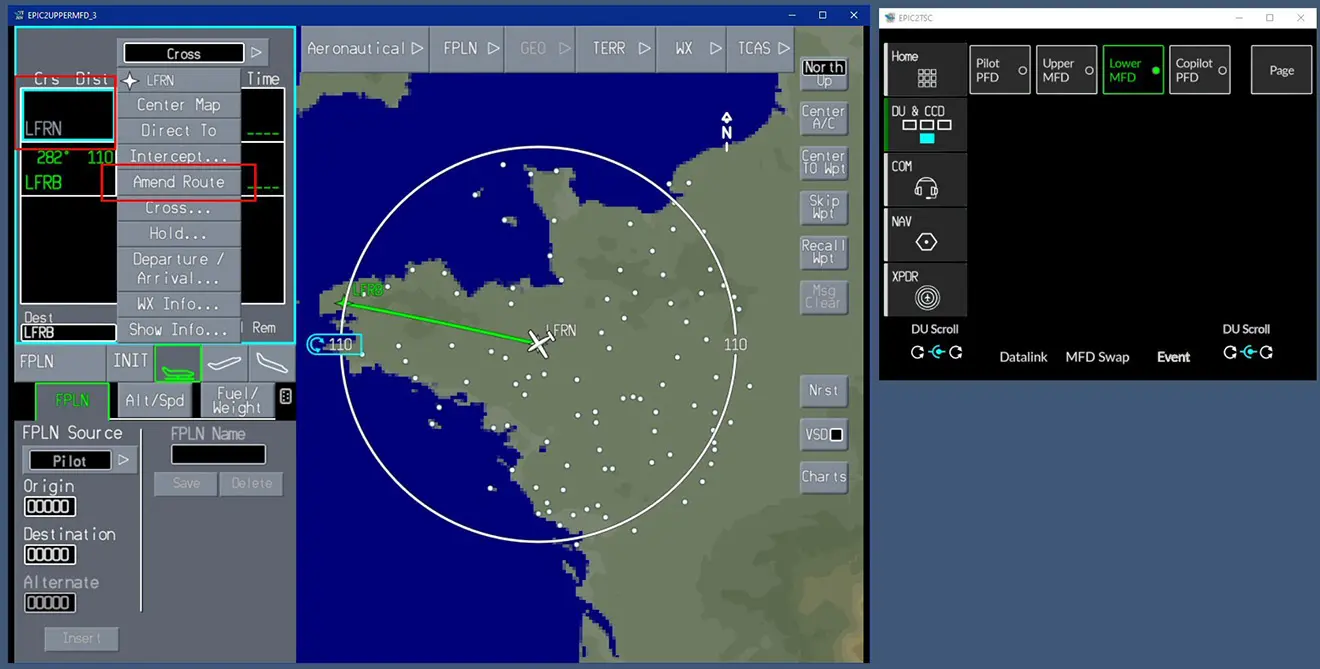
On va maintenant entrer un point de route situé après l'aéroport de départ ou après un autre point de route existant (dans l'exemple c'est la premier et le seul). On clique sur le point qui précède et sur le bouton "AMEND ROUTE".
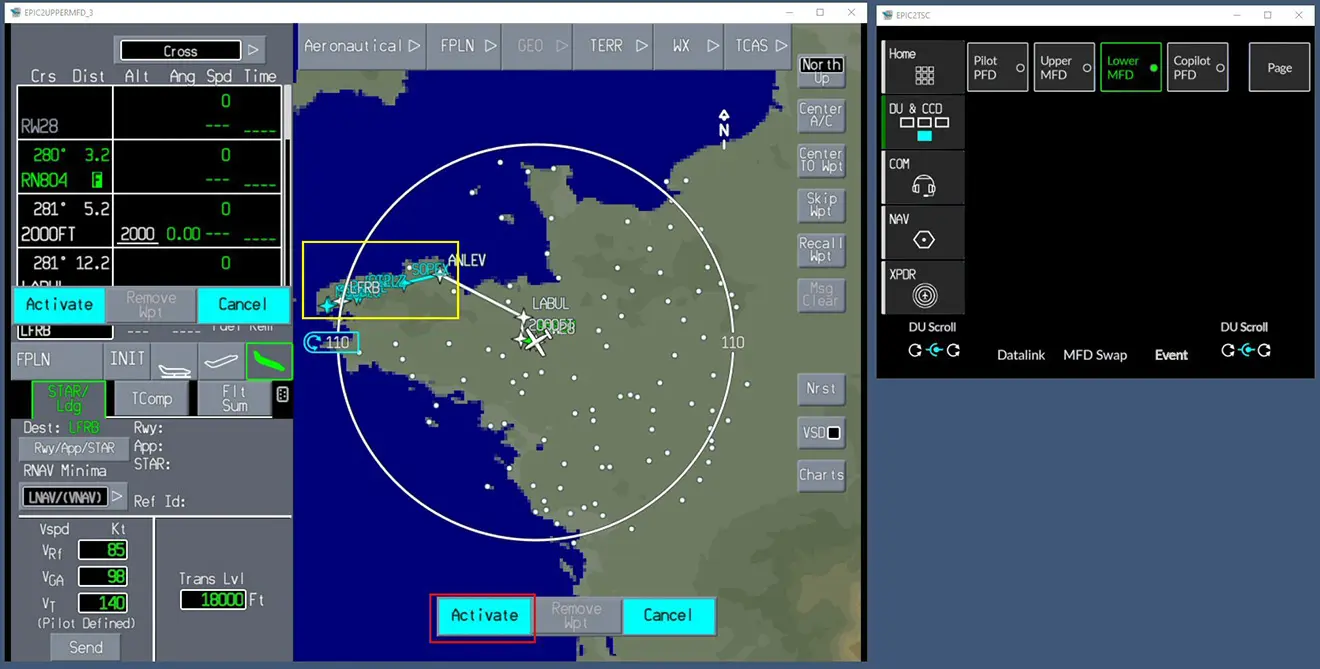
Via le clavier du CCC on va donc entrer le wp "ANLEV" et le valider par "ACTIVATE" (2 fois si nécessaire).

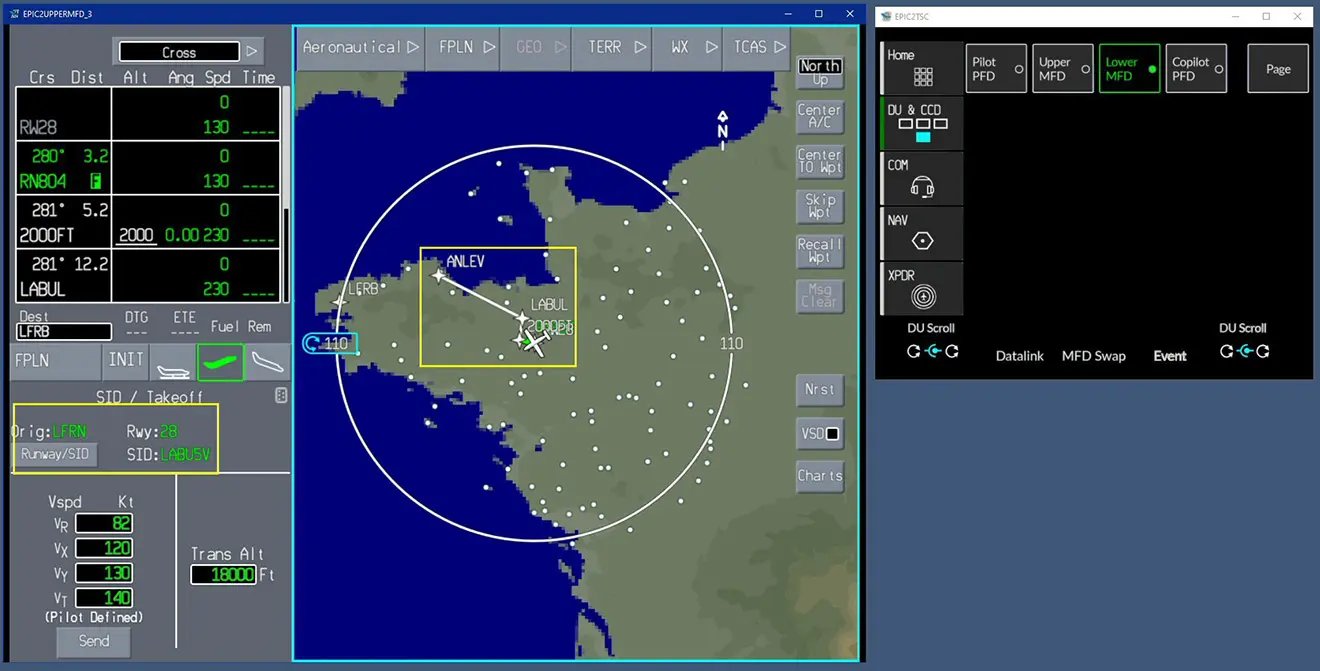
Dans notre cas, il apparaît une "Discontinuity" (cadres jaunes) qu'on va laisser car elle peut s'effacer en entrant d'autres wp ou les procédures départ/arrivée.
On va maintenant cliquer sur l'icône de l'avion en montée pour entrer la piste et la procédure de départ.

Ces éléments ne nécessitent pas d'utiliser le clavier car ils sont pris dans les AIRACS du simulateur. Une fois choisis, on valide par "INSERT".

La procédure s'affiche en bleu sur la carte et on valide par "ACTIVATE".

On va ensuite entrer la procédure d'arrivée en cliquant sur l'icône représentant un avion en descente.
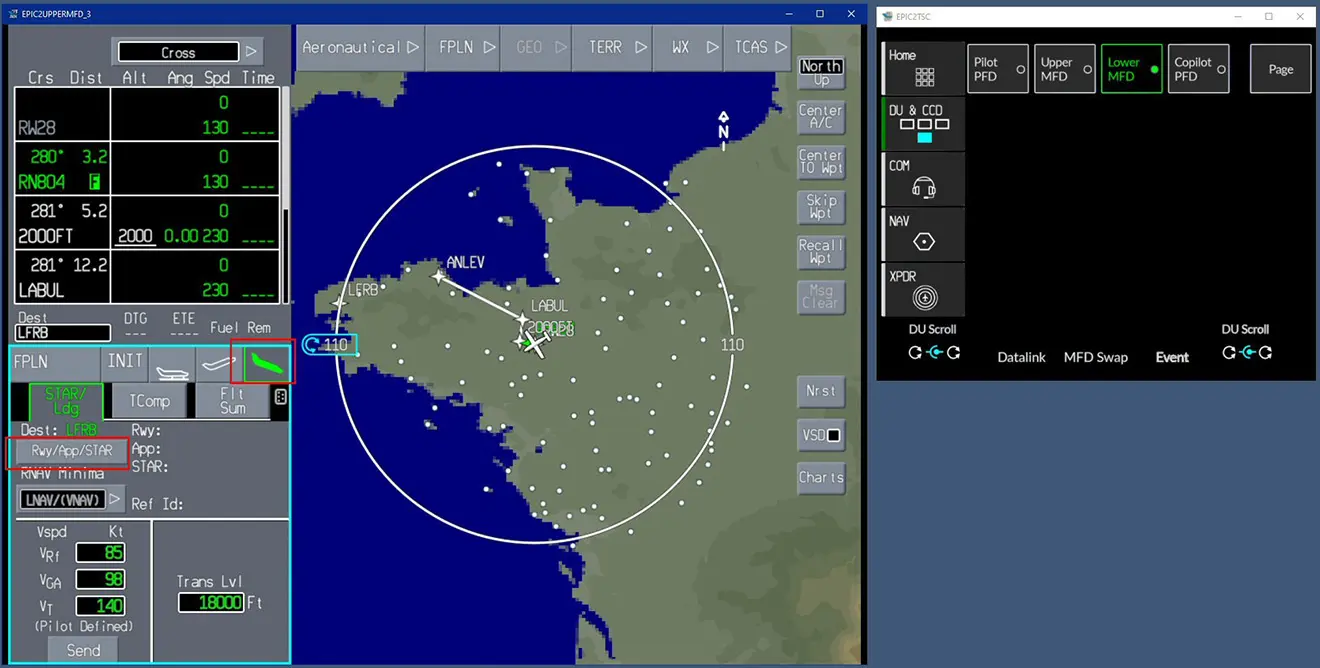
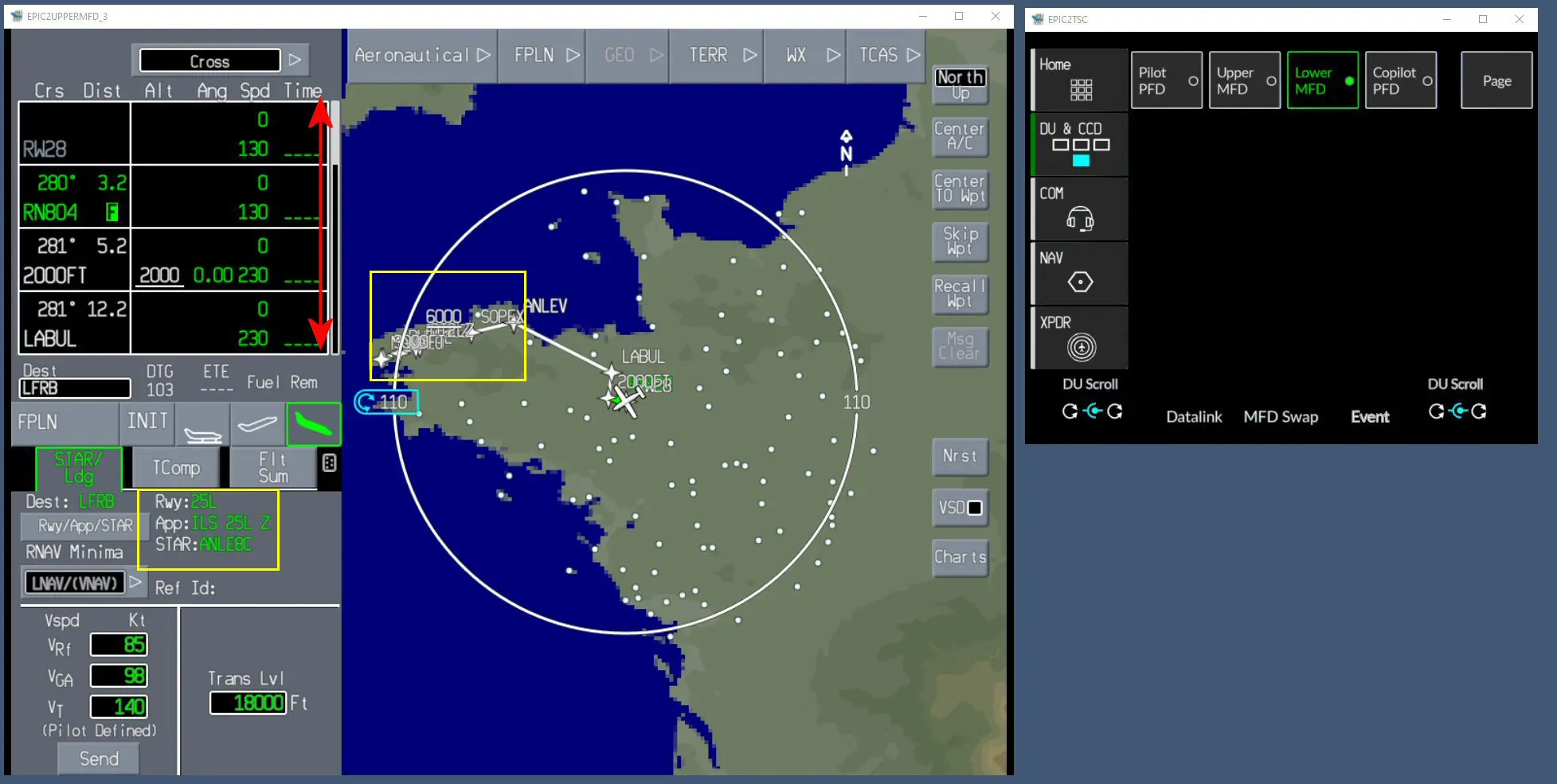
Là aussi, on utilise les données AIRAC, le processus d'entrée est la même que pour le départ. Ne pas oublier de cliquer sur le bouton "INSERT" qui va afficher en bleu la trajectoire sur la carte.
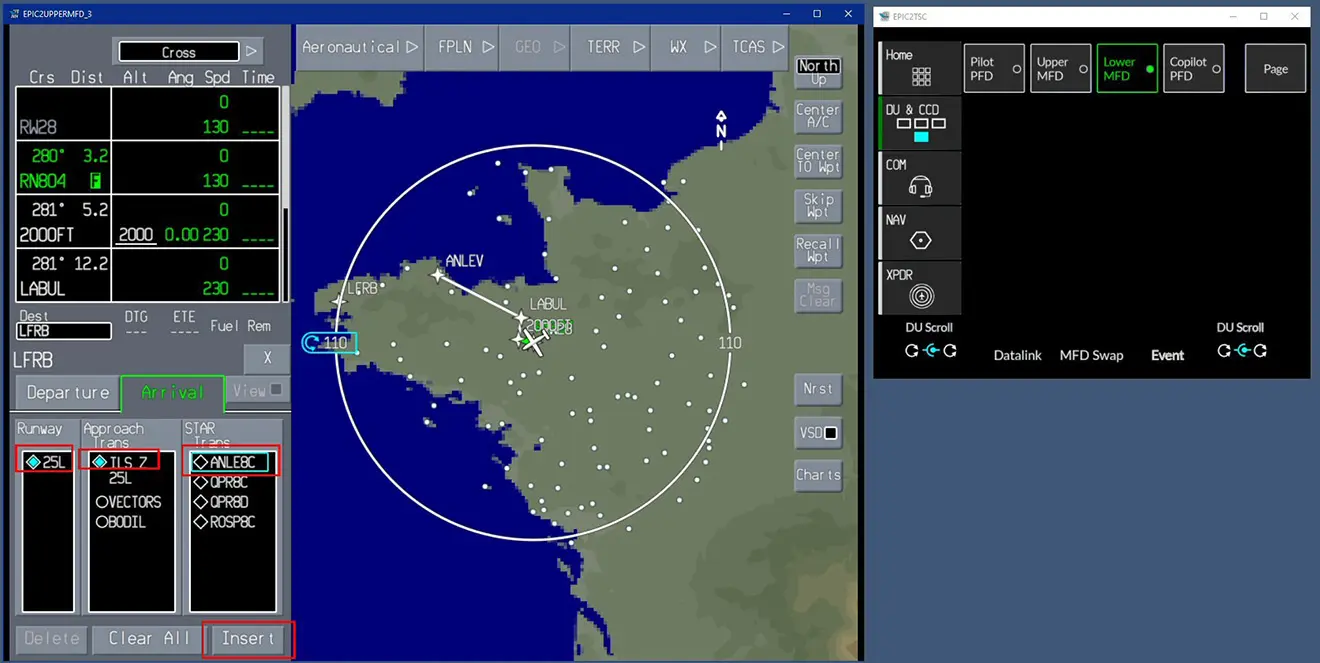
Et on valide l'approche par "ACTIVATE".
La trajectoire est maintenant complète, on va vérifier s'il y a des "Discontinuities" en déroulant le plan de vol par glissement de la souris le long du bord droit du plan de vol comme indiqué par les flèches rouges.
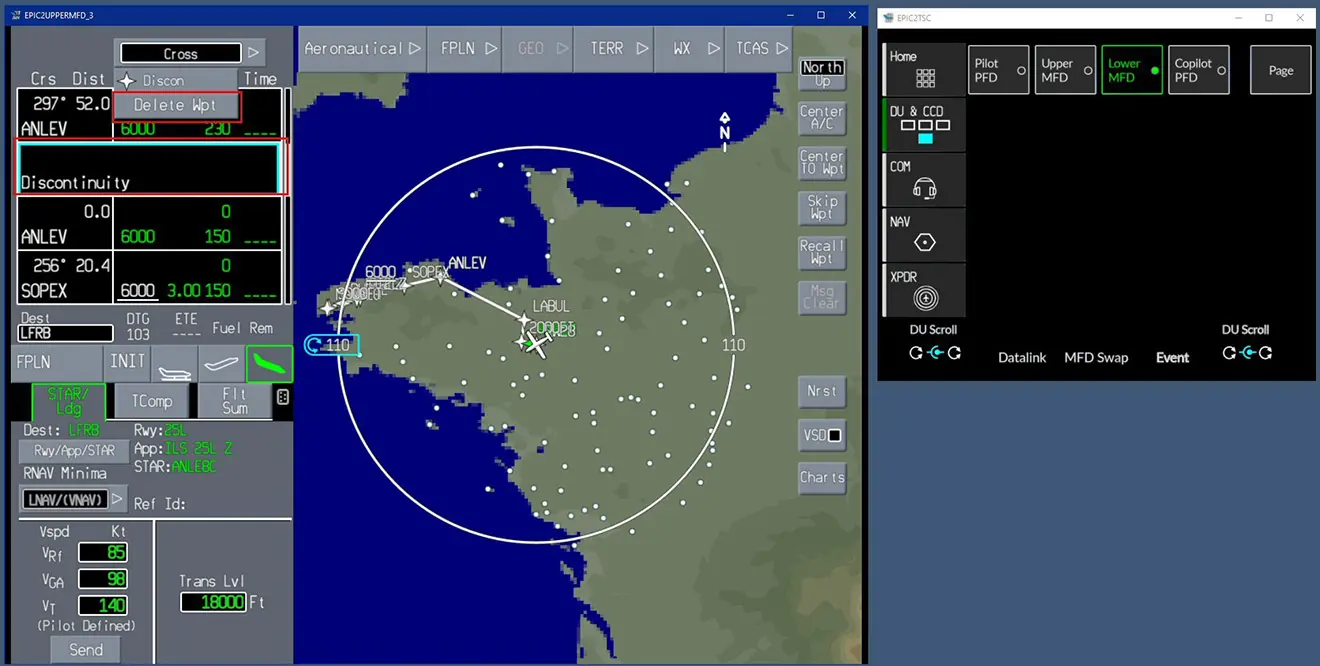
Il reste une discontinuité qu'on va enlever en cliquant dessus puis sur le bouton "Delete Wpt".
On valide la modification du plan de vol par "ACTIVATE".
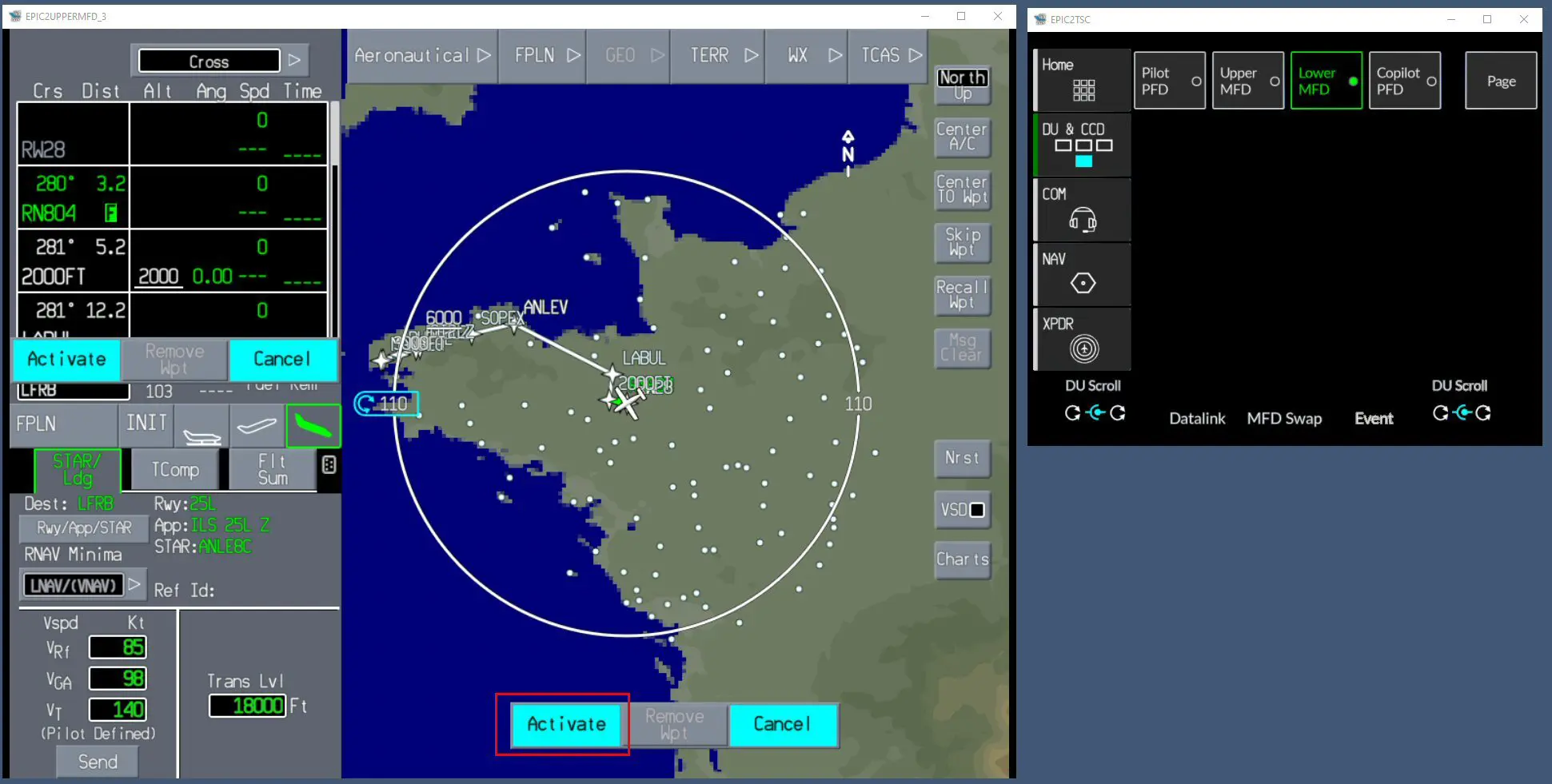
La discontinuité est enlevée, on vérifie qu'il n'y en a pas d'autre : le plan de vol est complet et prêt à être utilisé.
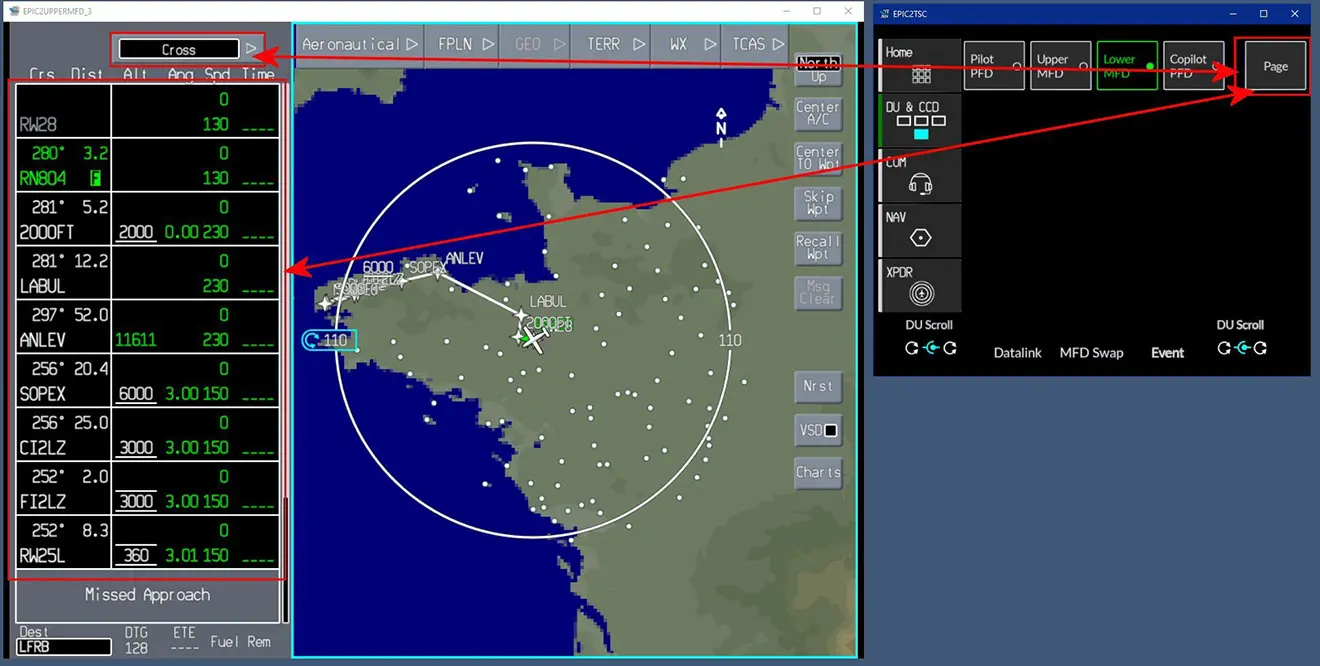
Nous ne verrons pas ici toutes les fonction du CCC, en voici une qui permet de visualiser toutes les altitudes de passages du plan de vol.
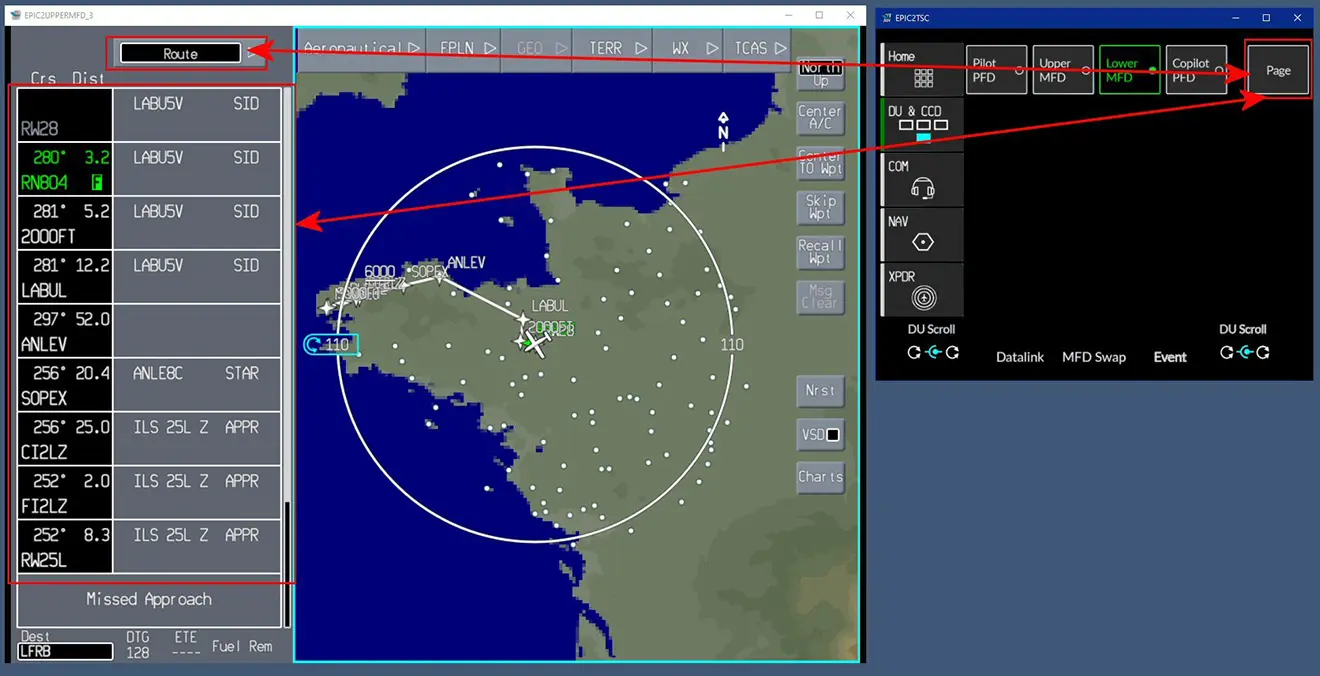
Et une autre pour détailler tout le plan de vol.
A vous de découvrir ses autres possibilités qui sont très nombreuses.
Spécificité FS2024 : via l'EFB intégré à tous les avions de FS2024, on peut charger ce GPS avec un plan de vol enregistré ou créé sous Simbrief ou avec Little Navmap. Ce sera l'objet d'un autre document.